
Telegrambot на СИ для связи с Arduino

Статья рассчитана на людей уже знакомых с
Здравствуйте.
Этого бота я писал для управления своим "
Он написан для Linux и работает через Webhook (то есть выступает в роли сервера получающего уведомления от Telegram автоматически), поэтому понадобится белый ip.
Коротко о его работе: вы пишите боту команду, он переправляет её на сервер, сервер оправляет команду ардуине, ардуина выполняет команду и возвращает статус серверу, и наконец сервер отправляет статус боту.
Теперь обо всём по порядку…
Предполагается что приложение «Telegram» уже установлено.
Перейдите по ссылке @BotFather где будет предложено открыть её в приложении…

Согласитесь с предложением.
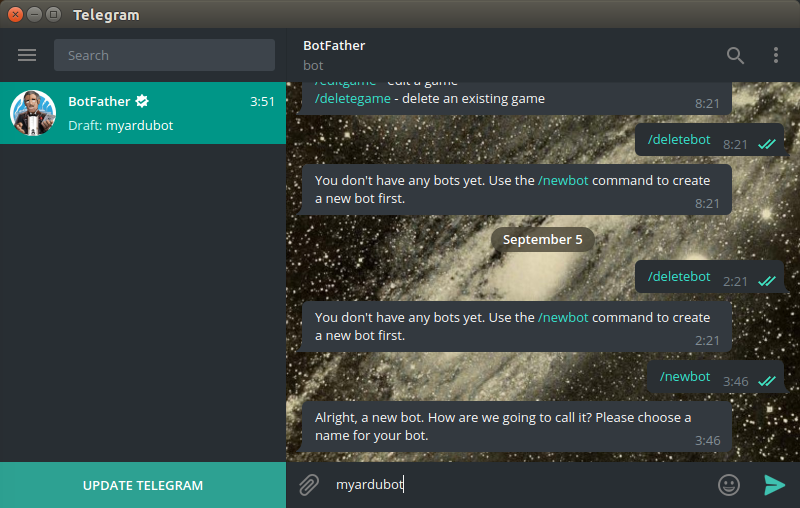
В открывшейся программе отправьте «отцу всех ботов» сообщение /newbot

Будет предложено придумать имя боту, например — myardubot.
Следом нужно придумать username бота, который должен заканчиваться словом — bot, пусть будет Myardubot.

Если всё прошло успешно, Вас поздравят с созданием нового бота и выдадут токен — 337394654:AAHCz4xEO_Gb0XNOchcvW4EuPoXsMaa32Tc. У Вас он естественно будет другой.

Токен — это пароль-идентификатор Вашего бота, его должны знать только Вы и никому его не показывать! В дальнейшем мы будем использовать его в запросах к нашему серверу.

Теперь в поиске найдите своего бота, кликните по нему и нажмите START…


Ну вот, Ваш бот запущен и готов отправлять и принимать сообщения через наш сервер. Однако перед тем как запустить сервер нужно создать самоподписной сертификат (работа будет вестись по защищённому протоколу — https) и установить Webhook.
Откройте терминал и установите необходимые библиотеки:
sudo apt install openssl libssl-devСоздайте ssl сертификат:
openssl req -newkey rsa:2048 -sha256 -nodes -keyout private.key -x509 -days 365 -out public.pemВ процессе Вам будут заданы вопросы, на которые можно отвечать нажатием Enter кроме пункта — Common Name (e.g. server FQDN or YOUR name) []:, здесь нужно ввести Ваш внешний ip.

В домашней папке появятся два файла — private.key и public.pem.
Упакуем оба файла в один — cert.pem:
cat private.key public.pem > cert.pemФайл cert.pem будет использоваться сервером, а public.pem понадобиться для установки Webhooka.
Устанавливаем Webhook:
curl -F "url=https://56.145.151.143:443/337394654:AAHCz4xEO_Gb0XNOchcvW4EuPoXsMaa32Tc" -F "certificate=@public.pem" https://api.telegram.org/bot337394654:AAHCz4xEO_Gb0XNOchcvW4EuPoXsMaa32Tc/setWebhookЗдесь нужно указать Ваш внешний ip и порт (443 или 8443), а после слеша Ваш токен (так рекомендует API), он будет служить признаком правильного запроса к нашему серверу. То есть, Telegram при обращении к нашему серверу будет посылать токен, а сервер проверять его наличие. Если сервер не обнаружит токена, то отбросит соединение.
Не забудьте поменять токен во второй части команды, и обратите внимание на то, что перед токеном есть слово bot.

Webhook установлен.
Всё что касается Telegram мы сделали, теперь займёмся ардуиной...
Как уже писалось выше, ардуина будет принимать наши команды, выполнять действие и отправлять обратно отчёт о сделанном.
Наглядный код для ардуины
char reciv_buf[16] = {0,};
void setup()
{
Serial.begin(57600);
pinMode(13, OUTPUT);
}
void loop()
{
int s = 0;
memset(reciv_buf, 0, 16);
while(Serial.available())
{
delay(1);
reciv_buf[s] = Serial.read();
if(reciv_buf[s] == '\n' || s > 14)
{
reciv_buf[s] = 0;
if(strstr(reciv_buf, "vkld13") != NULL)
{
digitalWrite(13, HIGH);
Serial.print("OK:vkld13");
Serial.print('\n');
}
if(strstr(reciv_buf, "otkld13") != NULL)
{
digitalWrite(13, LOW);
Serial.print("OK:otkld13");
Serial.print('\n');
}
memset(reciv_buf, 0, 16);
s = 0;
}
s++;
} // END while
} // END LOOP
Команды придумываете сами, вписываете их туда где — «vkld13» и т.д., а потом отправляете их боту.
Так же можно послать боту букву t, на что он ответит словом TEST.
Ну и наконец перейдём к серверу…
Скачайте сервер (telebotstd), положите его в папку вместе с ключами и там же создайте конфигурационный файл TelebotstD.conf со следующим содержимым:
port=443
token=337394654:AAHCz4xEO_Gb0XNOchcvW4EuPoXsMaa32Tc
mkpatch=/dev/ttyUSB0
baudrate=57600
В конце строк не должно быть пробелов.
После знаков «равно» впишите входящий порт сервера (тот что указывали при создании webhooka), свой токен, путь к ардуине и baudrate.
Подключите ардуину и дайте ей все права:
sudo chmod 777 /dev/ttyUSB0Сделайте сервер исполняемым:
sudo chmod +x ./telebotstdИ запускайте его:
./telebotstdВы увидите что сервер прочитал конфиг и ждёт соединения:

Теперь отправьте боту букву t и в ответ получите слово TEST:

Сервер напишет id отправителя сообщения (chat_id:274526150) и полученый текст (Text:t), а после «SendMessage:» будет написан заголовок запроса к Телеграму с токеном бота, id получателя и отправленное сообщение ({«chat_id»:274526150,«text»:«TEST»}).
То есть, Вы со своего телефона отправили боту сообщение с буквой t, бот отправил её Вашему серверу, сервер в ответ на это отправил сообщение с текстом «TEST» обратно боту, а бот передал его Вам на телефон.
Через 30 сек. бездействия, Телеграм разорвёт соединение (Disconnection:0).

Можно послать какую-нибудь нелепицу…


Сервер отправит это сообщение (как и любое другое за исключением t) ардуине (to_Ardu:echo 'bla-bla-bla' > /dev/ttyUSB0), но она никак не отреагирует, так как выполняет только записанные в неё команды.
Теперь пошлите vkld13. Загорится D13 и Вам придёт ответ — OK:vkld13

Сервер показал что отправил ардуине — to_Ardu:echo 'vkld13' > /dev/ttyUSB0, и что получил от неё в ответ — SM_from_Ardu: OK:vkld13 отправив это по назначению.

Команда ограничена 15-ю символами.
Ошибки пишутся в файл ErrTelebotstD.log.
По серверу вроде бы сказать больше нечего. Далее можно добавлять в скетч ардуины свои алгоритмы и команды так же, как это сделано в примере.
Исходник сервера
#include <stdio.h>
#include <openssl/bio.h>
#include <openssl/ssl.h>
#include <unistd.h>
#include <openssl/err.h>
#include <netinet/in.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <resolv.h>
#include <netdb.h>
#include <time.h>
#include <sys/wait.h>
#include <termios.h>
#include <fcntl.h>
#define BREADSIZE 2048
#define AREADSIZE 128
int fd;
int port = 0;
char token[64] = {0,};
char mkpatch[32] = {0,};
unsigned long int baudrate = 0;
char bRead[AREADSIZE] = {0,};
void error_log(char *my_error)
{
time_t t;
time(&t);
FILE *f;
f = fopen("ErrTelebotstD.log", "a");
if(f == NULL)
{
printf("Error open ErrTelebotstD.log.\n");
exit(0);
}
fprintf(f, "%s", ctime( &t));
fprintf(f, "Error: %s\n\n", my_error);
printf("Error: %s Write to ErrTelebotstD.log.\n", my_error);
fclose(f);
exit(0);
}
void read_conf()
{
FILE *mf;
char str[64] = {0,};
char *restr;
mf = fopen ("TelebotstD.conf","r");
if(mf == NULL) error_log("mf.");
printf ("Open config file.\n");
while(1)
{
restr = fgets(str, sizeof(str), mf);
if(restr == NULL)
{
if(feof(mf) != 0) break;
else error_log("read from config file.");
}
if(strstr(str,"port=") != NULL) { port = atoi(strstr(str, "port=") + 5); printf("Port:%d\n", port); }
char *p;
if((p = strstr(str,"token=")) != NULL)
{
int index = p - str;
int i = 0;
int ot = index + 6;
for(; i <= 62; i++)
{
token[i] = str[ot];
ot++;
if(token[i] == '\n')
{
token[i] = '\0';
printf("Token:%s\n", token);
break;
}
}
}
char *mkp;
if((mkp = strstr(str,"mkpatch=")) != NULL)
{
int index = mkp - str;
int i = 0;
int ot = index + 8;
for(; i <= 14; i++)
{
mkpatch[i] = str[ot];
ot++;
if(mkpatch[i] == '\n')
{
mkpatch[i] = '\0';
printf("Mkpatch:%s\n", mkpatch);
break;
}
}
}
char *sp;
if((sp = strstr(str,"baudrate=")) != NULL)
{
char mkspeed[8] = {0,};
int index = sp - str;
int i = 0;
int ot = index + 9;
for(; i <= 7; i++)
{
mkspeed[i] = str[ot];
ot++;
if(mkspeed[i] == '\n')
{
baudrate = strtoul(mkspeed, NULL, 0);
printf("Baudrate:%lu\n", baudrate);
break;
}
}
}
} // END while
printf ("Close config file.\n");
if(fclose(mf) == EOF) error_log("mf EOF.");
}
void child_kill() { printf("Child_kill.\n"); wait(NULL); }
void SendMessage(char *chat_id, char *send_text)
{
char host[] = "api.telegram.org";
char str[1024] = {0,};
int lenstr = (int)strlen("/sendMessage HTTP/1.1\r\nHost: api.telegram.org\r\nContent-Type: application/json\r\nContent-Length: ");
char json_str[128] = {0,};
snprintf(json_str, 1 + 11 + (int)strlen(chat_id) + 9 + (int)strlen(send_text) + 2, "%s%s%s%s%s", "{\"chat_id\":", chat_id, ",\"text\":\"", send_text, "\"}");
int lenjson = (int)strlen(json_str);
snprintf(str, 1 + 9 + (int)strlen(token) + lenstr + 3 + (int)strlen("\r\nConnection: close\r\n\r\n") + lenjson, "%s%s%s%d%s%s", "POST /bot", token, "/sendMessage HTTP/1.1\r\nHost: api.telegram.org\r\nContent-Type: application/json\r\nContent-Length: ", lenjson, "\r\nConnection: close\r\n\r\n", json_str);
struct hostent *server;
struct sockaddr_in serv_addr;
int sd = 0;
sd = socket(AF_INET, SOCK_STREAM, 0);
if (sd < 0) error_log("socket in SM.");
server = gethostbyname(host);
if (server == NULL) error_log("host in SM.");
memset(&serv_addr, 0, sizeof(serv_addr));
serv_addr.sin_family = AF_INET;
serv_addr.sin_port = htons(443);
memcpy(&serv_addr.sin_addr.s_addr,server->h_addr,server->h_length);
if(connect(sd,(struct sockaddr *)&serv_addr,sizeof(serv_addr)) < 0) error_log("connect.");
SSL_CTX * sslctx = SSL_CTX_new(TLSv1_2_client_method());
SSL * cSSL = SSL_new(sslctx);
if(SSL_set_fd(cSSL, sd) == 0) error_log("SSL_set_fd in SM.");
if(SSL_connect(cSSL) <= 0) error_log("SSL_connect in SM.");
int vsm = SSL_write(cSSL, str, (int)strlen(str));
if(vsm <= 0)
{
SSL_free(cSSL);
if(close(sd) == -1) error_log("close sd in SM.");
error_log("vsm = SSL_write in SM.");
}
printf("\nSendMessage: %s\n", str);
memset(str, 0, 1024);
int n = SSL_read(cSSL, str, 1022);
if(n <= 0)
{
SSL_free(cSSL);
if(close(sd) == -1) error_log("close client_3.");
printf("Err SSL_read in SM.\n");
}
//printf("\nReport_SM:%d\n%s\n", n, str);
SSL_free(cSSL);
SSL_CTX_free(sslctx);
if(close(sd) == -1) error_log("close sd in SendMessage.");
}
//////////////////////////////////////// ARDUINO /////////////////////////////////////////////////
void ardu_read_func(char *chat_id)
{
int i = 0;
int bytes = 0;
memset(bRead, 0, AREADSIZE * sizeof(char));
if((bytes = read(fd, bRead, AREADSIZE - 1)) == -1) error_log("Read_from_Arduino.");
for(i = 0; i <= bytes; i++)
{
if(bRead[i] == '\n')
{
bRead[i] = 0;
break;
}
}
tcflush(fd, TCIFLUSH);
printf("SM_from_Ardu: %s\n\n", bRead);
SendMessage(chat_id, bRead);
} // END ardu_read_func
/////////////////////////////////////////// open_port /////////////////////////////////////////////////
void open_port()
{
fd = open(mkpatch, O_RDWR | O_NOCTTY);
if(fd == -1) error_log("open /dev/ttyXXX.");
else
{
struct termios options;
tcgetattr(fd, &options);
switch(baudrate)
{
case 4800:
cfsetispeed(&options, B4800);
cfsetospeed(&options, B4800);
break;
case 9600:
cfsetispeed(&options, B9600);
cfsetospeed(&options, B9600);
break;
case 19200:
cfsetispeed(&options, B19200);
cfsetospeed(&options, B19200);
break;
case 38400:
cfsetispeed(&options, B38400);
cfsetospeed(&options, B38400);
break;
case 57600:
cfsetispeed(&options, B57600);
cfsetospeed(&options, B57600);
break;
case 115200:
cfsetispeed(&options, B115200);
cfsetospeed(&options, B115200);
break;
default:
error_log("baudrate_port.");
break;
}
options.c_cflag |= (CLOCAL | CREAD);
options.c_iflag = IGNCR;
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
options.c_cflag &= ~CSIZE;
options.c_cflag |= CS8;
options.c_cc[VMIN] = 1;
options.c_cc[VTIME] = 1;
options.c_lflag = ICANON;
options.c_oflag = 0;
options.c_oflag &= ~OPOST;
tcflush(fd, TCIFLUSH);
tcsetattr(fd, TCSANOW, &options);
}
}
int main()
{
read_conf();
open_port();
sleep(2);
tcflush(fd, TCIFLUSH);
//////////////////////////////////// SSL //////////////////////////////////////////
OpenSSL_add_all_algorithms();
SSL_load_error_strings();
SSL_library_init();
SSL_CTX * sslctx = SSL_CTX_new(TLSv1_2_server_method());
///////////////////////////// READ certificate ////////////////////////////////////
if(SSL_CTX_use_certificate_file(sslctx, "cert.pem", SSL_FILETYPE_PEM) <= 0) error_log("use_certificate_file.");
if(SSL_CTX_use_PrivateKey_file(sslctx, "cert.pem", SSL_FILETYPE_PEM) <= 0) error_log("use_PrivateKey_file.");
if(!SSL_CTX_check_private_key(sslctx)) error_log("check_private_key.");
/////////////////////////////////// SERVER ////////////////////////////////////////
int sd = socket(AF_INET, SOCK_STREAM, 0);
if (sd < 0) error_log("descriptor socket.");
int one = 1;
setsockopt(sd, SOL_SOCKET, SO_REUSEADDR, &one, sizeof(int));
struct sockaddr_in s_addr;
s_addr.sin_family = AF_INET;
s_addr.sin_addr.s_addr = INADDR_ANY;
s_addr.sin_port = htons(port);
if(bind(sd, (struct sockaddr *)&s_addr, sizeof(s_addr)) < 0) error_log("binding.");
if(listen(sd, 5) == -1)
{
close(sd);
error_log("listen.");
}
char read_buffer[BREADSIZE] = {0,};
int client = 0;
while(1)
{
printf("Wait connection.\n");
memset(read_buffer, 0, BREADSIZE);
client = accept(sd, NULL, NULL);
if(client == -1)
{
printf("Not cl accept.\n");
if(close(client) == -1) error_log("close client_1.");
continue;
}
//printf("OK_1.\n");
SSL *ssl = SSL_new(sslctx);
if(SSL_set_fd(ssl, client) == 0) error_log("SSL_set_fd.");
int acc = SSL_accept(ssl);
if(acc <= 0)
{
SSL_free(ssl);
if(close(client) == -1) error_log("close client_2.");
printf("Not SSL_accept.\n");
continue;
}
//printf("OK2_acc:%d\n", acc);
/////////////////////// FORK ///////////////////////////
pid_t pid;
signal(SIGCHLD, child_kill);
pid = fork();
if(pid != 0)
{
SSL_free(ssl);
if(close(client) == -1) error_log("close client_pid.");
continue;
}
int n = SSL_read(ssl, read_buffer, BREADSIZE - 2); // first SSL_read
if(n <= 0)
{
SSL_free(ssl);
if(close(client) == -1) error_log("close client_3.");
printf("Disconnection:%d\n", n);
exit(0);
}
//printf("First SSL_read:%d %s\n", n, read_buffer);
//printf("OK_3.\n");
if(strstr(read_buffer, token) == NULL)
{
SSL_free(ssl);
if(close(client) == -1) error_log("close client_4.");
printf("Not valid POST.\n");
exit(0);
}
//printf("OK_4.\n");
if(strstr(read_buffer, "Content-Type: application/json") == NULL)
{
SSL_free(ssl);
if(close(client) == -1) error_log("close client_5.");
printf("Not json.\n");
exit(0);
}
//printf("OK_5.\n");
int len = atoi(strstr(read_buffer, "Content-Length: ") + strlen("Content-Length: "));
memset(read_buffer, 0, BREADSIZE);
int m = SSL_read(ssl, read_buffer, len); // second SSL_read
if(m <= 0)
{
SSL_free(ssl);
if(close(client) == -1) error_log("close client_8.");
error_log("m = SSL_read.");
}
//printf("\nSecond SSL_read:%d %s\n", m, read_buffer);
char *p;
//memset(chat_id, 0, 16);
char chat_id[16] = {0,};
if((p = strstr(read_buffer, "chat\":{\"id\":")) != NULL)
{
int index = p - read_buffer;
int i = 0;
int ot = index + 12;
for(; i <= 14; i++)
{
chat_id[i] = read_buffer[ot];
ot++;
if(chat_id[i] == ',')
{
chat_id[i] = 0;
printf("\nchat_id:%s\n", chat_id);
break;
}
}
}
char *q;
char msg_text[64] = {0,};
if((q = strstr(read_buffer, "text\":\"")) != NULL)
{
int index = q - read_buffer;
int i = 0;
int ot = index + 7;
for(; i <= 62; i++)
{
msg_text[i] = read_buffer[ot];
ot++;
if(msg_text[i] == '"')
{
msg_text[i] = 0;
printf("Text:%s\n", msg_text);
break;
}
}
}
int v = SSL_write(ssl, "HTTP/1.1 200 OK\r\nConnection: close\r\n\r\n", 38);
if(v <= 0)
{
SSL_free(ssl);
if(close(client) == -1) error_log("v = SSL_write.");
}
SSL_free(ssl);
if(close(client) == -1) error_log("close client_6.");
if(msg_text[0] == 't' && msg_text[1] == 0)
{
SendMessage(chat_id, "TEST");
}
else
{
char to_Ardu[128] = {0,};
snprintf(to_Ardu, strlen(msg_text) + strlen(mkpatch) + 11, "echo '%s' > %s", msg_text, mkpatch);
printf("\nto_Ardu:%s\n", to_Ardu);
system(to_Ardu);
ardu_read_func(chat_id);
}
exit(0);
} // END while(1)
if(close(sd) == -1) error_log("close sd client_7.");
}
gcc -Wall -Wextra telebotstd.c -o telebotstd -lcrypto -lsslMakefile для OpenWrt
include $(TOPDIR)/rules.mk
PKG_NAME:=telebot
PKG_VERSION:=1
PKG_RELEASE:=1
PKG_BUILD_DIR:= $(BUILD_DIR)/$(PKG_NAME)
include $(INCLUDE_DIR)/package.mk
define Package/telebot
SECTION:=utils
CATEGORY:=Utilities
TITLE:=telebot - Telebot utility
DEPENDS:= +libopenssl +lssl
endef
define Package/telebot/description
telebot - Telebot utility
endef
define Build/Prepare
mkdir -p $(PKG_BUILD_DIR)
$(CP) ./src/* $(PKG_BUILD_DIR)/
endef
define Build/Compile
$(TARGET_CC) $(TARGET_CFLAGS) -c -o $(PKG_BUILD_DIR)/telebot.o $(PKG_BUILD_DIR)/telebot.c
$(TARGET_CC) $(TARGET_LDFLAGS) -o $(PKG_BUILD_DIR)/telebot $(PKG_BUILD_DIR)/telebot.o -lcrypto -lssl
endef
define Package/telebot/install
$(INSTALL_DIR) $(1)/
$(INSTALL_BIN) $(PKG_BUILD_DIR)/telebot $(1)/
endef
$(eval $(call BuildPackage,telebot))
make package/telebot/compile V=sЕсли будете запускать на роутере, то установите libopenssl (потребуется около 700Кб).
opkg update
opkg install libopensslЕсли что-то не понятно, то спрашивайте. С удовольствием отвечу.

- +32
- stD

17464

Поддержать автора
Комментарии (0)