
CAN-шина и stm32 - часть вторая - фильтры и два CAN

Здравствуйте.
Первая часть закончилась на том, что я обещал рассказать про настройку фильтров и работу двух CAN-интерфейсов на одном камне. Начнём с фильтров.
Фильтры
Как уже говорилось ранее, у каждого CAN-интерфейса есть 14 фильтров.
В двух словах, фильтр работает так: в первый «регистр фильтра» мы прописываем некий идентификатор пакета, а во второй некую маску, в результате чего CAN будет принимать только некоторый диапазон кадров, а все остальные отбрасывать. Это первый способ. Второй способ: в один или оба «регистра фильтра» мы прописываем конкретные идентификаторы кадров, которые хотим получать — всё остальное будет отброшено.
Фильтр нельзя настроить как исключающий, то есть если нужно принимать все кадры кроме какого-то одного, например 0x0296, придётся настроить два фильтра, так чтобы они принимали кадры с 0x0000 по 0x0295, и с 0x0297 по 0x07FF.
Для гибкой настройки фильтрации есть четыре варианта использования «регистров фильтра» для каждого фильтра. Картинка из референс мануала иллюстрирует это…
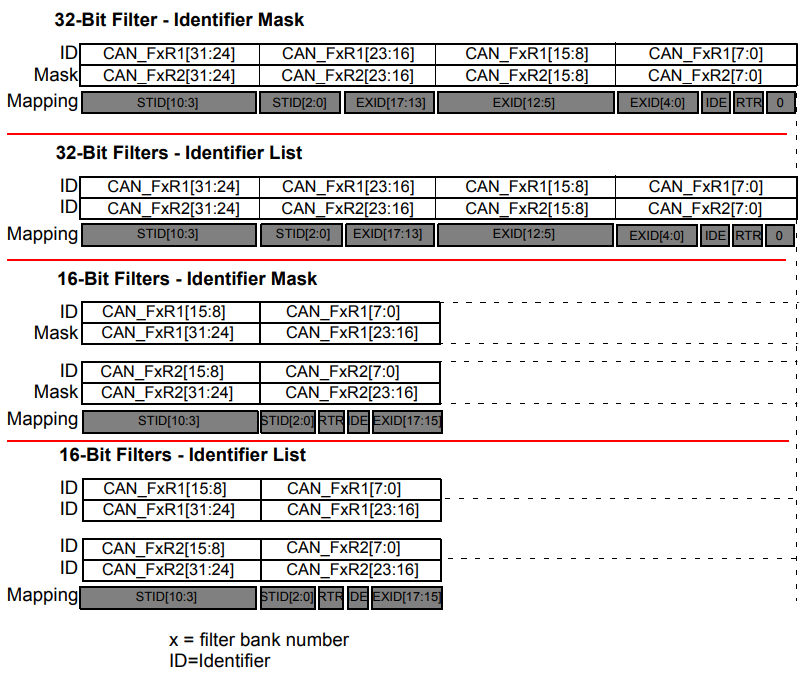
Красными полосками я разделил варианты использования «регистров фильтра».
Первый и второй варианты подходят для фильтрации как стандартных (11 бит), так и расширенных (29 бит) идентификаторов, а третий и четвёртый только для стандартных. Теперь давайте рассмотрим всё это подробно.
Первый вариант — 32-Bit Filter — Identifier Mask
Заранее предупреждаю — будет сложно, так что приготовьтесь

В первый «регистр фильтра» (ID
Указываем номер фильтра…
sFilterConfig.FilterBank = 0;Указываем режим работы фильтра…
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;Режим идентификатора и маски. Обращаю ваше внимание на этот параметр, если записать сюда другой макрос (CAN_FILTERMODE_IDLIST), тогда фильтр будет работать по другому. Поскольку эти макросы схожие, будьте внимательны.
Указываем масштаб (размерность) фильтра…
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;32 бита, говорит о том, что фильтроваться могут либо стандартные (11 бит) идентификаторы, либо расширенные (29 бит).
Далее, в прошлой части мы писали такой код…
sFilterConfig.FilterIdHigh = 0x0000; // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = 0x0000; // младшая часть первого "регистра фильтра"
sFilterConfig.FilterMaskIdHigh = 0x0000; // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = 0x0000; // младшая часть второго "регистра фильтра"Это два «регистра фильтра», каждый из которых условно разделён на старшую и младшую часть. Везде записаны нули чтоб принимать все кадры.
Сейчас мы настроим фильтр для работы с идентификаторами стандартных кадров, то есть с 11-битными идентификаторами.
Не смотря на то, что размерность фильтра у нас указана 32 бита (CAN_FILTERSCALE_32BIT), мы можем настраивать фильтр для работы и со стандартными (11 бит), и с расширенными (29 бит) идентификаторами. Если бы мы указали размерность фильтра 16 бит (CAN_FILTERSCALE_16BIT), тогда фильтр работал бы только со стандартными кадрами, об этом речь пойдёт ниже.
Предположим что мы хотим принимать идентификаторы с 0x0100 по 0x0107, тогда в старшую часть первого «регистра фильтра» записываем начальный идентификатор, со сдвигом…
sFilterConfig.FilterIdHigh = 0x0100<<5; // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = 0x0000; // младшая часть первого "регистра фильтра"Сдвиг делается потому, что идентификатор у нас 11-ти битный, и согласно рисунку для него выделена старшая часть, старшей части «регистра фильтра». Такое вот получилось «масло масляное».

Вот эта область…

То есть получилось так…

В бинарном формате число 0x0100 выглядит так — 0000000100000000, а поскольку количество стандартных идентификаторов не может превышать 0x07FF (0000011111111111), то первые пять нулей никому не нужны, поэтому «выкидываются на мороз».
Переходим к старшей части второго «регистра фильтра». Сюда мы записываем (опять же со сдвигом) число 0x07F8…
sFilterConfig.FilterMaskIdHigh = 0x07F8<<5; // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = 0x0000; // младшая часть второго "регистра фильтра"Вот это поворот, скажет неискушенный читатель, наверное автор что-то перепутал. Но нет, всё правильно, и сейчас будем с этим разбираться.
В младшую часть второго «регистра фильтра» мы опять записали нолик, а число 0x07F8 (0000011111111000) легло у нас в старшую часть второго «регистра фильтра» вот так…

Первые (слева) пять ноликов опять же выкинуты, по описанным выше причинам.
Таким образом, число 0x07F8 у нас является маской. Немного забегая вперёд, скажу что это число нужно подбирать самостоятельно, экспериментальным путём. Теперь давайте разбираться как это работает.
Теперь смотрите что получается. Когда прилетает какой-то идентификатор, он попадает в систему фильтрации, и происходит следующее: между прилетевшим идентификатором и маской выполняется побитовая операция «И» (она же AND, она же &), и далее этот результат сравнивается с тем, что записано в «первом регистре» фильтра, в нашем случае это число 0x0100. Если результат совпадает, тогда идентификатор (кадр с этим идентификатором) принимается, если нет — отбрасывается.
Чтоб внести ясность можно описать этот механизм простой программой…
#include <stdio.h>
#include <stdint.h>
int main()
{
uint32_t ID = 0x0100;
uint32_t Mask = 0x07F8;
for(uint32_t i = 0; i < 0x0800; i++)
{
if((i & Mask) == ID)
{
printf("0x%04X\n", i);
}
}
return 0;
}Цикл
Результатом работы программы будет вот такой вывод…
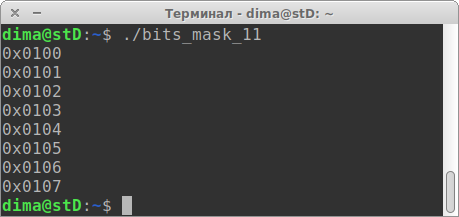
Идентификаторы с 0x0100 по 0x0107, которые мы планировали принимать.
По ссылке можно качнуть программу, которая выводит значения в HEX и бинарном формате…
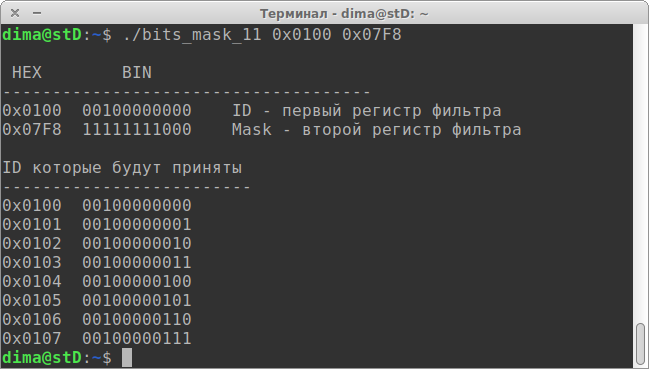
С её помощью можно методом «тыка» подбирать маску. Программа написана для Линукса, но должна скомпилиться и для Windows. Либо просто перенесите её на stm.
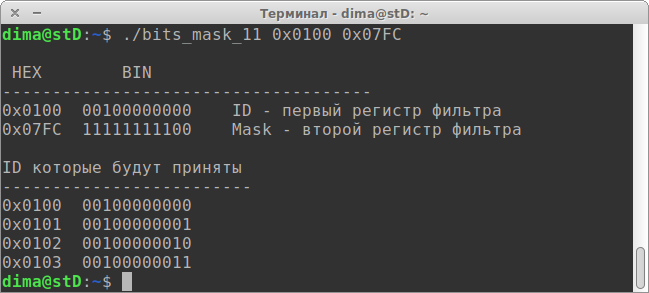
Если мы изменим в маске последнюю цифру с 0x07F8 на 0x07FC, то наш CAN будет принимать идентификаторы с 0x0100 по 0x0103…
Совсем не обязательно настраивать фильтр так, чтобы принимаемые идентификаторы были последовательны в порядке возрастания, можно делать как угодно, всё зависит от ID и Mask. Например если в ID записать 0x0200, а маску 0x03FD, тогда будут приниматься идентификаторы 0x0200, 0x0202, 0x0600 и 0x0602…
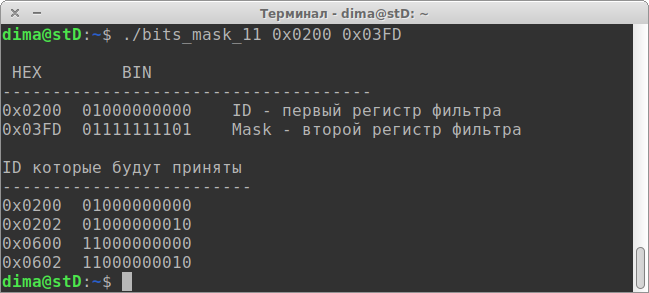
Чтобы понять как подбирать маску взгляните на последнюю картинку. Если бит в маске равен единице значит и соответствующий бит в прилетевшем идентификаторе тоже должен быть равен единице. Если же бит в маске равен нулю, тогда не важно чему равен соответствующий бит в прилетевшем идентификаторе.
Первый бит в маске (слева направо) равен нулю, соответственно не важно чему равен первый бит у идентификаторов, которые будут приняты, может быть ноль или единица. Второй бит в маске равен единице, поэтому принимаются только те идентификаторы, у которых второй бит равен единице. Десятый бит в маске равен нулю, значит не важно чему равен этот бит у идентификаторов, которые будут приняты.
Для закрепления понимания давайте сделаем маску, у которой все биты кроме трёх последних будут равны единице…
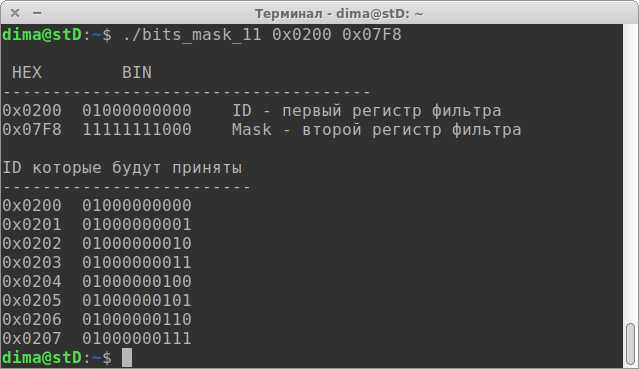
Вуаля. Теперь мы принимаем идентификаторы в диапазоне с 0x0200 по 0x0207. Обратите внимание, что маска такая же как и для идентификаторов с 0x0100 по 0x0107. Это ничего не значит, просто к слову.
В общем думаю более менее всё понятно. Берёте какой-нибудь идентификатор, придумываете маску, скармливаете это программе и смотрите какие идентификаторы будут приняты.
Теперь давайте мысленно вернёмся к началу статьи, вспомним что мы хотели принимать идентификаторы с 0x0100 по 0x0107, и закончим настройку фильтра №0.
В результате у нас получится следующий код…
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0100<<5; // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = 0x0000; // младшая часть первого "регистра фильтра"
sFilterConfig.FilterMaskIdHigh = 0x07F8<<5; // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = 0x0000; // младшая часть второго "регистра фильтра"
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Последний параметр просто включает фильтр, а вот про предпоследний нужно сказать пару слов. Как вы помните у CAN'а есть два приёмных буфера CAN_RX_FIFO0 и CAN_RX_FIFO1. В данном случае мы указали CAN_RX_FIFO0, это означает что все принятые кадры прошедшие через фильтр №0 попадут CAN_RX_FIFO0. Отсюда вытекает, что настроив несколько фильтров, мы можем указать в какой именно буфер будут сваливаться принятые кадры. Теперь давайте настроим ещё один фильтр.
Возьмём последний пример и будем принимать идентификаторы с 0x0200 по 0x0207 через фильтр №1…
sFilterConfig.FilterBank = 1;
sFilterConfig.FilterIdHigh = 0x0200 << 5; // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = 0x0000; // младшая часть первого "регистра фильтра"
sFilterConfig.FilterMaskIdHigh = 0x07F8 << 5; // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = 0x0000; // младшая часть второго "регистра фильтра"
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Указываем только номер фильтра и прописываем значения в «регистры фильтра». Все остальные настройки будут автоматически взяты из настроек фильтра №0.
Таким образом инициализация CAN'а и фильтров будет выглядеть так…
...
/* USER CODE BEGIN CAN_Init 0 */
CAN_FilterTypeDef sFilterConfig;
/* USER CODE END CAN_Init 0 */
hcan.Instance = CAN1;
hcan.Init.Prescaler = 4;
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_13TQ;
hcan.Init.TimeSeg2 = CAN_BS2_2TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = ENABLE;
hcan.Init.AutoWakeUp = DISABLE;
hcan.Init.AutoRetransmission = ENABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = ENABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN_Init 2 */
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0100<<5; // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = 0x0000; // младшая часть первого "регистра фильтра"
sFilterConfig.FilterMaskIdHigh = 0x07F8<<5; // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = 0x0000; // младшая часть второго "регистра фильтра"
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
sFilterConfig.FilterBank = 1;
sFilterConfig.FilterIdHigh = 0x0200 << 5; // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = 0x0000; // младшая часть первого "регистра фильтра"
sFilterConfig.FilterMaskIdHigh = 0x07F8 << 5; // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = 0x0000; // младшая часть второго "регистра фильтра"
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Если мы хотим помещать кадры прошедшие через фильтр №1 в буфер CAN_RX_FIFO1, тогда это нужно указать. И вообще, если работаете с разными буферами, то не лишним будет указывать это везде чтоб не запутаться, хуже не будет.
sFilterConfig.FilterBank = 1;
sFilterConfig.FilterIdHigh = 0x0200 << 5; // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = 0x0000; // младшая часть первого "регистра фильтра"
sFilterConfig.FilterMaskIdHigh = 0x07F8 << 5; // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = 0x0000; // младшая часть второго "регистра фильтра"
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO1;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Таким образом кадры с 0x0100 по 0x0107 будут падать в буфер CAN_RX_FIFO0, а кадры с 0x0200 по 0x0207 в буфер CAN_RX_FIFO1.
Далее если есть необходимость вы можете настроить ещё сколько нужно фильтров — максимальный №13.
Режим фильтра (CAN_FILTERMODE_IDMASK) и размерность (CAN_FILTERSCALE_32BIT) тоже можно настраивать для каждого фильтра отдельно, но об этом позже.
Теперь рассмотрим фильтрование 29-ти битных идентификаторов. Вы же помните, что мы всё ещё разбираем первый вариант использования «регистров фильтра», который подразумевает фильтрование 11-ти и 29-ти битных идентификаторов

Поскольку настройки режима и размерности фильтра здесь те же самые, что и в предыдущих примерах, мы настроим только номер фильтра и «регистры фильтра», ну и укажем буфер CAN_RX_FIFO1 (можно CAN_RX_FIFO0, как хотите).
Настроим фильтр №2, а принимать будем кадры с идентификаторами в диапазоне от 0x00010000 до 0x00010007…
sFilterConfig.FilterBank = 2;
sFilterConfig.FilterIdHigh = (uint16_t)(0x00010000 >> 13); // старшая часть первого "регистра фильтра"
sFilterConfig.FilterIdLow = (uint16_t)(0x00010000 << 3) | 0x04; // младшая часть первого "регистра фильтра"
sFilterConfig.FilterMaskIdHigh = (uint16_t)(0x1FFFFFF8 >> 13); // старшая часть второго "регистра фильтра"
sFilterConfig.FilterMaskIdLow = (uint16_t)(0x1FFFFFF8 << 3) | 0x04; // младшая часть второго "регистра фильтра"
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO1;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Здесь у нас «регистры фильтра» используются полностью, тоже делается сдвиг, чтоб биты встали в нужные места, и ещё в младшие части добавляется | 0x04.
ID и Mask лягут в области STID и EXID…

… а в бит IDE будет записана единичка с помощью | 0x04 (00000100). Это сообщит системе, что фильтр настроен на работу с расширенным идентификатором. То есть, всегда, когда настраиваем фильтр на работу с расширенным кадром, добавляем | 0x04.
Бит RTR не трогаем, однако если захотим настроить фильтр на работу с Remote Frame, тогда в него надо записать единицу. Это касается и стандартных, и расширенных кадров.
Операции с ID и маской здесь точно такие же как и в предыдущем примере, и вот такая же программка, только для 29-ти битных идентификаторов…
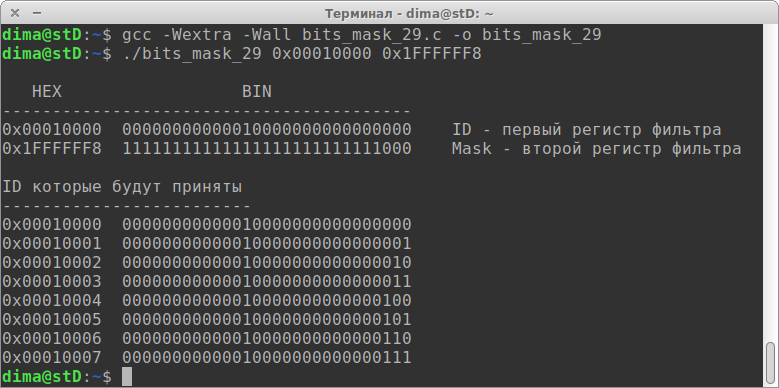
Дальше вы уже знаете что с этим делать.
Вы может настроить несколько фильтров для расширенных кадров, и совмещать их со стандартными, как мы это только что сделали. Сейчас наш CAN принимает стандартные идентификаторы с 0x0100 по 0x0107 и с 0x0200 по 0x0207, складывая их в CAN_RX_FIFO0, и расширенные с 0x00010000 по 0x00010007, складывая их в CAN_RX_FIFO1.
На этом первый вариант закончен, самое трудное позади, дальше будет легко.
Второй вариант — 32-Bit Filters — Identifier List

Здесь всё просто, фильтр можно настроить на приём только одного или двух конкретных идентификатора, они просто записываются в первый и второй «регистры фильтра», так же со сдвигом. Единственное важное отличие от предыдущего варианта, это режим фильтра, тут он будет CAN_FILTERMODE_IDLIST.
Фильтр №3 будет принимать два стандартных идентификатора — 0x06D9 и 0x04C6…
sFilterConfig.FilterBank = 3;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDLIST;
sFilterConfig.FilterIdHigh = 0x06D9 << 5;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x04C6 << 5;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
А фильтр №4 будет принимать два расширенных идентификатора — 0x000006D9 и 0x000004C6…
sFilterConfig.FilterBank = 4;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDLIST;
sFilterConfig.FilterIdHigh = (uint16_t)(0x000006D9 >> 13);
sFilterConfig.FilterIdLow = (uint16_t)(0x000006D9 << 3) | 0x04;
sFilterConfig.FilterMaskIdHigh = (uint16_t)(0x000004C6 >> 13);
sFilterConfig.FilterMaskIdLow = (uint16_t)(0x000004C6 << 3) | 0x04;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Если нужно принимать только один идентификатор, тогда во второй «регистр фильтра» нужно прописать то же, что и в первом…
sFilterConfig.FilterIdHigh = (uint16_t)(0x000006D9 >> 13);
sFilterConfig.FilterIdLow = (uint16_t)(0x000006D9 << 3) | 0x04;
sFilterConfig.FilterMaskIdHigh = (uint16_t)(0x000006D9 >> 13);
sFilterConfig.FilterMaskIdLow = (uint16_t)(0x000006D9 << 3) | 0x04;Получится что CAN будет два раза фильтровать одно и то же, но другого варианта видимо нет, так как если записать туда просто нули, будет приниматься идентификатор 0x0000.
Со вторым вариантом всё.
Третий вариант — 16-Bit Filters — Identifier Mask
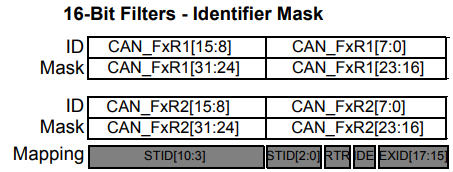
Этот вариант, как и первый, работает с маской, но может фильтровать только стандартные (11 бит) кадры. Достоинство этого варианта перед первым в том, что один фильтр можно настроить на два диапазона идентификаторов. Это достигается за счёт использования «регистров фильтра» полностью, а не только старшие части.
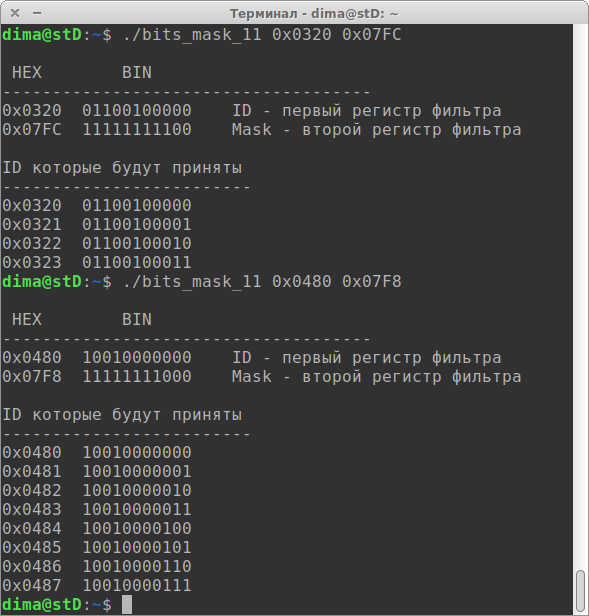
Будем принимать кадры в диапазонах с 0x0320 по 0x0323, и с 0x0480 по 0x0487.
Настроим фильтр №5…
sFilterConfig.FilterBank = 5;Режим фильтра на работу с маской…
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;Важное отличие от предыдущих примеров — размерность фильтра указываем 16 бит…
sFilterConfig.FilterScale = CAN_FILTERSCALE_16BIT;В старшую и младшую часть первого «регистра фильтра» записываем начальные ID первого и второго диапазона…
sFilterConfig.FilterIdHigh = 0x0320 << 5; // ID 1
sFilterConfig.FilterIdLow = 0x0480 << 5; // ID 2
А в старшую и младшую часть второго «регистра фильтра» записываем соответствующие маски…
sFilterConfig.FilterMaskIdHigh = 0x07FC << 5; // Mask 1
sFilterConfig.FilterMaskIdLow = 0x07F8 << 5; // Mask 2
Целиком будет так…
sFilterConfig.FilterBank = 5;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_16BIT;
sFilterConfig.FilterIdHigh = 0x0320 << 5; // ID 1
sFilterConfig.FilterIdLow = 0x0480 << 5; // ID 2
sFilterConfig.FilterMaskIdHigh = 0x07FC << 5; // Mask 1
sFilterConfig.FilterMaskIdLow = 0x07F8 << 5; // Mask 2
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Проверяем в программе…
Если нужно принимать только один диапазон, тогда вместо второго идентификатора и маски нужно прописать то же что и для первого…
sFilterConfig.FilterIdHigh = 0x0320 << 5; // ID 1
sFilterConfig.FilterIdLow = 0x0320 << 5; // ID 2
sFilterConfig.FilterMaskIdHigh = 0x07FC << 5; // Mask 1
sFilterConfig.FilterMaskIdLow = 0x07FC << 5; // Mask 2
Опять же, получится что CAN будет выполнять лишнюю работу, но если записать туда нули, тогда будут приниматься вообще все стандартные кадры.
Надеюсь тут всё понятно.
Четвёртый вариант — 16-Bit Filters — Identifier List
Этот вариант похож на второй, только опять же, мы можем фильтровать не два конкретных идентификатора, а четыре. И как вы уже наверно догадались, они могут быть только стандартными.
Будем принимать идентификаторы 0x0690, 0x0693, 0x0696 и 0x0699.
Настраиваем фильтр №6, и меняем режим на CAN_FILTERMODE_IDLIST…
sFilterConfig.FilterBank = 6;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDLIST;
sFilterConfig.FilterScale = CAN_FILTERSCALE_16BIT;
sFilterConfig.FilterIdHigh = 0x0690 << 5; // ID 1
sFilterConfig.FilterIdLow = 0x0693 << 5; // ID 2
sFilterConfig.FilterMaskIdHigh = 0x0696 << 5; // ID 3
sFilterConfig.FilterMaskIdLow = 0x0699 << 5; // ID 4
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
Опять же, если вместо какого-то идентификатора вписать 0x0000, то будет приниматься кадр 0x0000.
С последним вариантом, равно как и с разбором фильтров, покончено.
В довершение осталось сказать что фильтр настроенный как CAN_FILTERSCALE_32BIT имеет более высокий приоритет чем CAN_FILTERSCALE_16BIT.
То есть если мы настроим два фильтра вот так…
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_16BIT; // отличие
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; // буфер 0
sFilterConfig.FilterActivation = ENABLE;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
sFilterConfig.FilterBank = 1;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; // отличие
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO1; // буфер 1
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
… все кадры будут складываться в буфер 1.
Так же и номера фильтров имеют приоритет. Чем меньше номер фильтра, тем выше у него приоритет. В примере ниже, все кадры будут складываться опять же в буфер 1.
sFilterConfig.FilterBank = 1;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; // буфер 0
sFilterConfig.FilterActivation = ENABLE;
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO1; // буфер 1
if(HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
А если поменять номера фильтров, то в буфер 0. Всё.
Два CAN'а на одном камне
Единственной особенностью CAN2 является то, что он не может работать при отключённом CAN1, во всём остальном настройки CAN2 такие же как у CAN1, кроме номеров фильтров. Чтоб CAN2 заработал, достаточно просто активировать CAN1 и настроить у него хотя бы один фильтр.
То есть инициализация обоих CAN'ов будет такая…
///////////// CAN 1 ///////////////
static void MX_CAN1_Init(void)
{
CAN_FilterTypeDef sFilterConfig;
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 4;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_15TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_2TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = ENABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = DISABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = ENABLE;
if(HAL_CAN_Init(&hcan1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN1_Init 2 */
/////////////////// Filter CAN 1 ////////////////////////
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
if(HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
}
///////////// CAN 2 ///////////////
static void MX_CAN2_Init(void)
{
CAN_FilterTypeDef sFilterConfig;
hcan2.Instance = CAN2;
hcan2.Init.Prescaler = 4;
hcan2.Init.Mode = CAN_MODE_NORMAL;
hcan2.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan2.Init.TimeSeg1 = CAN_BS1_15TQ;
hcan2.Init.TimeSeg2 = CAN_BS2_2TQ;
hcan2.Init.TimeTriggeredMode = DISABLE;
hcan2.Init.AutoBusOff = ENABLE;
hcan2.Init.AutoWakeUp = DISABLE;
hcan2.Init.AutoRetransmission = DISABLE;
hcan2.Init.ReceiveFifoLocked = DISABLE;
hcan2.Init.TransmitFifoPriority = ENABLE;
if(HAL_CAN_Init(&hcan2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN2_Init 2 */
/////////////////// Filter CAN 2 ////////////////////////
sFilterConfig.FilterBank = 14;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
sFilterConfig.SlaveStartFilterBank = 14;
if(HAL_CAN_ConfigFilter(&hcan2, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
}
Для CAN1 фильтры с 0 по 13, для CAN2 фильтры с 14 по 27. У CAN2 есть дополнительный параметр —
Разумеется CAN'ы можно настраивать на разные скорости. Собственно не знаю что ещё сказать.
Не смотря на то, что в мануалах CAN2 называют Slave, это полностью самостоятельный интерфейс, просто он не может работать без включённого CAN1, так как именно CAN1 включает всю систему буферов, фильтров, почтовых ящиков, и т.д. Видимо это какая-то особенность проектирования камня. Наверно сначала не планировали два CAN'а делать, а потом передумали и приладили

Если CAN1 не используется и к нему не подключён трансивер, тогда ножку RX нужно подтянуть к плюсу, можно внутреннюю подтяжку пользовать.
Запускаются оба CAN'а так…
HAL_CAN_Start(&hcan1);
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING | CAN_IT_ERROR | CAN_IT_BUSOFF | CAN_IT_LAST_ERROR_CODE);
HAL_CAN_Start(&hcan2);
HAL_CAN_ActivateNotification(&hcan2, CAN_IT_RX_FIFO0_MSG_PENDING | CAN_IT_ERROR | CAN_IT_BUSOFF | CAN_IT_LAST_ERROR_CODE);
Если CAN1 не используется, тогда его запускать не нужно.
Колбек для ошибок…
void HAL_CAN_ErrorCallback(CAN_HandleTypeDef *hcan)
{
if(hcan->Instance == CAN1)
{
uint32_t er = HAL_CAN_GetError(&hcan1);
sprintf(trans_str,"ER CAN_1 %lu %08lX", er, er);
trans_to_usart1(trans_str);
}
else if(hcan->Instance == CAN2)
{
uint32_t er = HAL_CAN_GetError(&hcan2);
sprintf(trans_str,"ER CAN_2 %lu %08lX", er, er);
trans_to_usart1(trans_str);
}
}
Колбек для приёма, если у обоих CAN'ов задействован буфер CAN_RX_FIFO0…
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
/////////////////////////////// CAN1 //////////////////////////////////////
if(HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &RxHeader_1, RxData_1) == HAL_OK)
{
}
/////////////////////////////// CAN2 //////////////////////////////////////
if(HAL_CAN_GetRxMessage(&hcan2, CAN_RX_FIFO0, &RxHeader_2, RxData_2) == HAL_OK)
{
}
}
Если для обоих CAN'ов задействован буфер CAN_RX_FIFO1…
void HAL_CAN_RxFifo1MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
/////////////////////////////// CAN1 //////////////////////////////////////
if(HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO1, &RxHeader_1, RxData_1) == HAL_OK)
{
}
/////////////////////////////// CAN2 //////////////////////////////////////
if(HAL_CAN_GetRxMessage(&hcan2, CAN_RX_FIFO1, &RxHeader_2, RxData_2) == HAL_OK)
{
}
}
Обратите внимание, что в названии функции ...RxFifo0… поменялось на ...RxFifo1...
Если для разных CAN'ов настроены разные буферы…
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
/////////////////////////////// CAN1 //////////////////////////////////////
if(HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &RxHeader_1, RxData_1) == HAL_OK)
{
}
}
void HAL_CAN_RxFifo1MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
/////////////////////////////// CAN2 //////////////////////////////////////
if(HAL_CAN_GetRxMessage(&hcan2, CAN_RX_FIFO1, &RxHeader_2, RxData_2) == HAL_OK)
{
}
}
Если CAN1 не используется, тогда для него ничего писать не нужно.
Ну и отправка…
if(HAL_CAN_GetTxMailboxesFreeLevel(&hcan1) > 0)
{
HAL_CAN_AddTxMessage(&hcan1, &TxHeader_1, TxData_1, &TxMailbox_1);
}
if(HAL_CAN_GetTxMailboxesFreeLevel(&hcan2) > 0)
{
HAL_CAN_AddTxMessage(&hcan2, &TxHeader_2, TxData_2, &TxMailbox_2);
}Статью писал долго, с перерывами, так что если что упустил/забыл — пишите в чат.
Это всё, всем спасибо

Телеграм-чат istarik
Телеграм-чат STM32

- 0
- stD

51617

Поддержать автора
Комментарии (0)